KIT - Karlsruhe Institute of Technology
image/svg+xml
Health Robotics and Automation (HERA)
skip navigation
Home
Legals
Privacy Policy
Accessibility
Sitemap
KIT
de
search
search
News
Staff
Research
Publications
Education
Theses
Jobs
Directions
Wiki
Startpage
Home
Legals
Privacy Policy
Accessibility
Sitemap
search
search
Campusplan
Campus Map
Health Robotics and Automation (HERA)
Startpage
Theses
Home
News
Staff
Research
Publications
Education
Theses
Jobs
Directions
Wiki
Theses
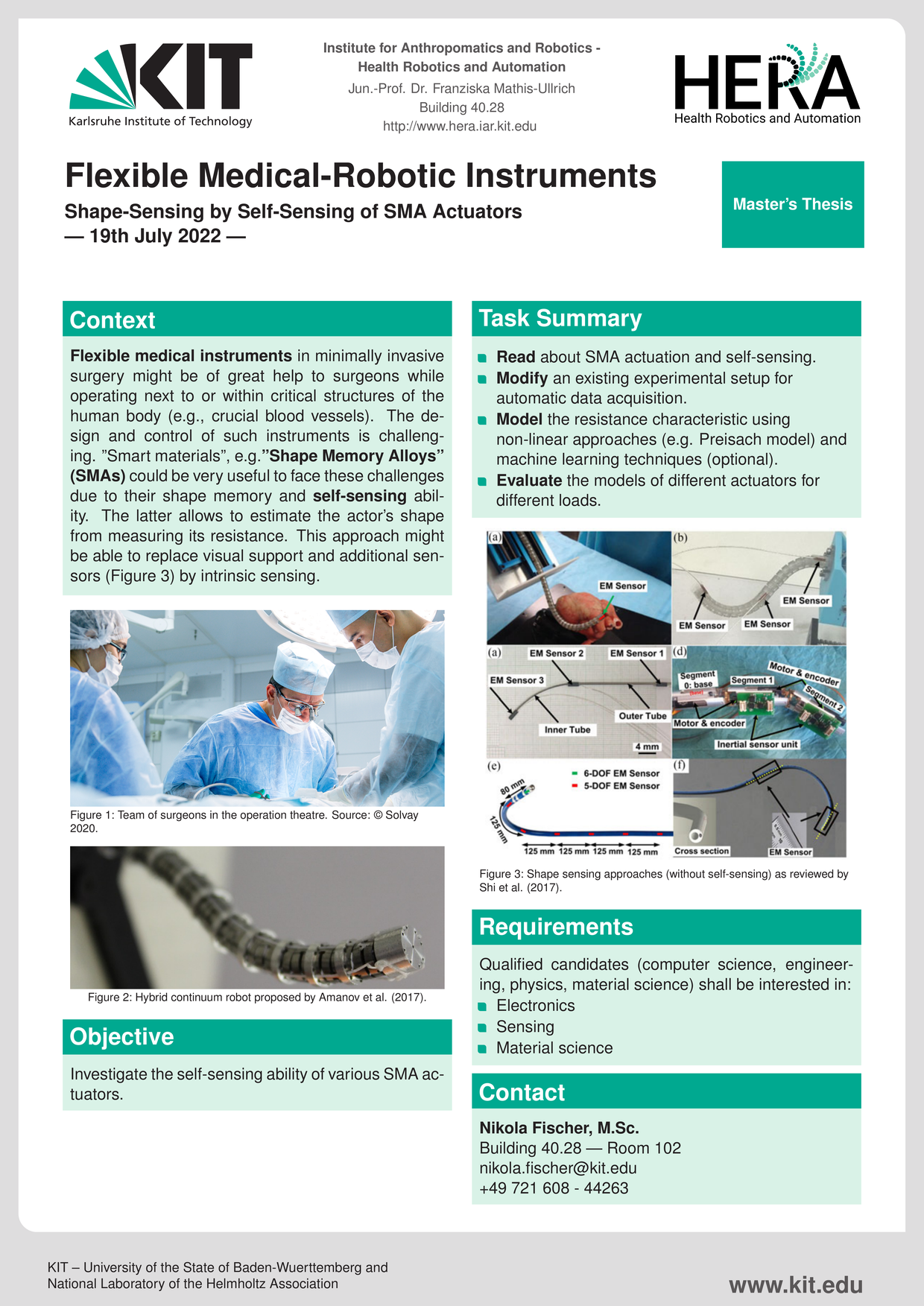
Shape-Sensing by Self-Sensing of SMA Actuators
Subject:
Flexible Medical-Robotic Instruments
Type:
Master's Thesis
Supervisor:
Nikola Fischer
Links:
PDF-File