KIT - Karlsruher Institut für Technologie
Health Robotics and Automation (HERA)
Navigation überspringen
Home
Impressum
Datenschutz
Barrierefreiheit
Sitemap
KIT
en
suchen
suchen
News
Mitarbeiter
Forschung
Publikationen
Studium und Lehre
Abschlussarbeiten
Stellenausschreibungen
Anfahrt
Wiki
Startseite
Home
Impressum
Datenschutz
Barrierefreiheit
Sitemap
suchen
suchen
Campusplan
Campusplan
Health Robotics and Automation (HERA)
Startseite
Abschlussarbeiten
Startseite
News
Mitarbeiter
Forschung
Publikationen
Studium und Lehre
Abschlussarbeiten
Stellenausschreibungen
Anfahrt
Wiki
Abschlussarbeiten
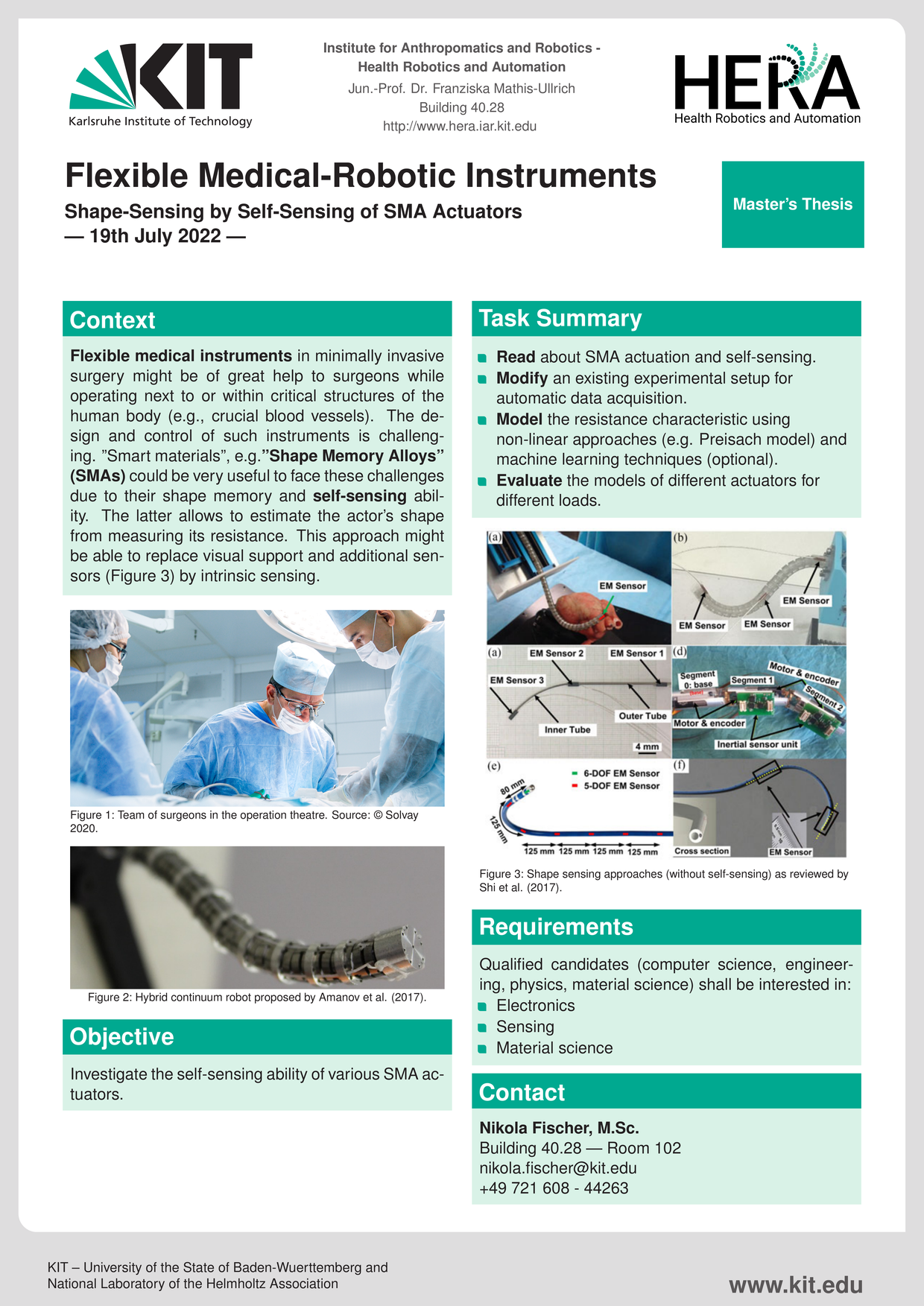
Shape-Sensing by Self-Sensing of SMA Actuators
Forschungsthema:
Flexible Medical-Robotic Instruments
Typ:
Masterarbeit
Betreuung:
Nikola Fischer
Links:
PDF-File