
Koala MARS
- Contact:
- Funding:
Helmholtz Information & Data Science School for Health (HIDSS4Health)
- Partner:
- Startdate:
01.06.2020
- Enddate:
31.05.2023
Cooperative multi-agent reinforcement learning for next-generation cognitive robotics in laparoscopic surgery
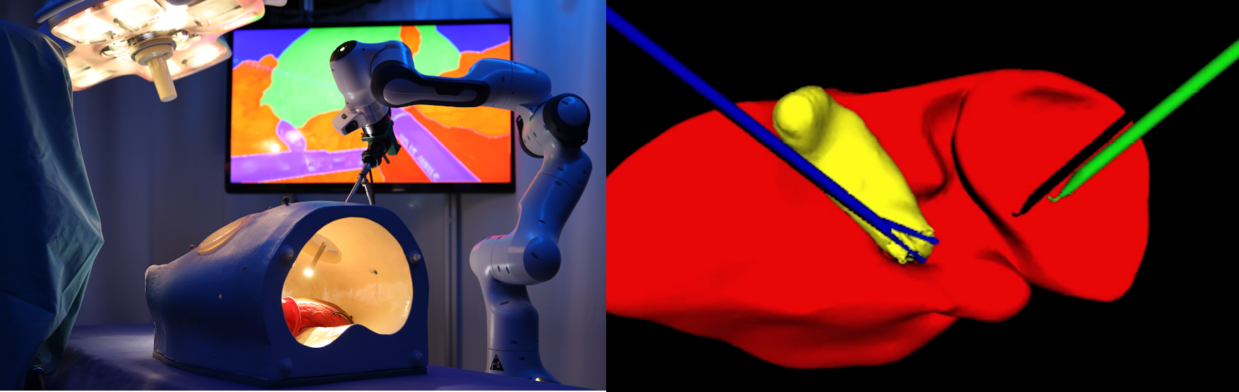
Laparoscopic surgery is a team effort. A surgeon and her assistant(s) collaborate to solve a shared task working individually and as a team for a successful surgical outcome. However, our society faces increasing shortage of skilled surgeons and assistants, especially in rural areas. This shortage may be resolved by providing cognitive surgical robots that automate certain tasks. Our project addresses the highly interdependent behavior of surgeon and assistant(s) as a multi-agent system problem of human and artificial agents using methods of cooperative multi-agent reinforcement learning (cMARL). In contrast to previous work, this project aims to train multiple, decentralized artificial agents that cooperatively solve a shared, robot-assisted laparoscopic task.